İstanbul °C
Askaynak Automation, Vitra’nın ilk yerli robotik otomasyon hattını kurdu

Eczacıbaşı-Lincoln Electric Askaynak, Vitrifiye sektörünün öncü şirketlerinden Eczacıbaşı Yapı Gereçleri (EYAP) ile önemli bir projeye imza attı. Proje kapsamında Askaynak Automation markasıyla Vitra’nın daha önce yurtdışından tedarik ettiği robotik sırlama hatlarını sağlayacak olan Askaynak, Vitra’nın ilk yerli robotik otomasyon hattını da kurdu. Sadece 16 haftada hattın sorunsuz bir şekilde çalışır hale getirildiği projede, tüm mühendislik ve entegrasyon süreci Askaynak Automation’ın öz kaynakları kullanılarak tamamlandı. Hali hazırda teknik özellikleriyle göz dolduran sistemin gelecekte Vitra’nın ana sistemi ile haberleşerek, sırlanacak ürün bilgilerini sisteme otomatik yüklediği bir hale getirilmesi hedefleniyor.
Eczacıbaşı-Lincoln Electric Askaynak, imalat sektörüne katma değeri yüksek robotik çözümler sunan markası Askaynak Automation ile Eczacıbaşı Holding topluluk kuruluşları içerisinde gerçekleştireceği başarılı robotik otomasyon projelerinin başlangıcı olacak önemli bir projeye imza attı. Proje kapsamında sektöründe öncü olan Vitra’nın daha önce yurtdışından tedarik ettiği robotik sırlama hatlarını sağlayacak olan Askaynak, Vitra’nın ilk yerli robotik otomasyon hattını da kurdu. Sadece 16 haftada tüm tasarımları yaparak, devreye alma işlemini tamamladığı hattı sorunsuz bir şekilde çalışır hale getiren Askaynak, sağladığı yüksek mühendislik ve güçlü yerel teknik destekle Vitra’ya önemli bir avantaj da kazandırdı.
Eczacıbaşı Topluluğu’nun Sanayi 4.0 dönüşümü ve kuruluşlar arasında iyi bir bütünlüğün oluşturulmasının, öz kaynakların şirketler arasında transferi ve birbirini desteklemesi açısından da ayrı bir önem taşıdığını ifade eden Askaynak Robotik Otomasyon Sistemleri Müdürü Ahmet Samim Karkin, “Askaynak Automation personeli için yeni bir prosesi öğrenme ve uygulama fırsatı olan bu projeden elde ettiğimiz bilgi birikimi ve tecrübenin, potansiyel iş birliklerinin kapısını aralayacağına ve yeni pazarlar ortaya koyarak büyüme hedeflerimize katkı sunacağına inanıyoruz. Hali hazırda teknik özellikleriyle göz dolduran bu sistemin gelecekte Vitra’nın ana sistemiyle haberleşerek, sırlanacak ürün bilgilerini sisteme otomatik yüklediği bir hale getirilmesini hedefliyoruz. Ar-Ge çalışmalarına yaptığımız yatırımlar, bilgi birikimi ve emeğiyle bu projelerin hayata geçmesini sağlayan iç ve dış paydaşlarımız sayesinde bu hedefin beklenenden çok daha kısa sürede hayat bulacağını biliyoruz” diye konuştu.
“Robot ile Sırlama, İnsan Gücünden Tasarruf Sağlıyor”
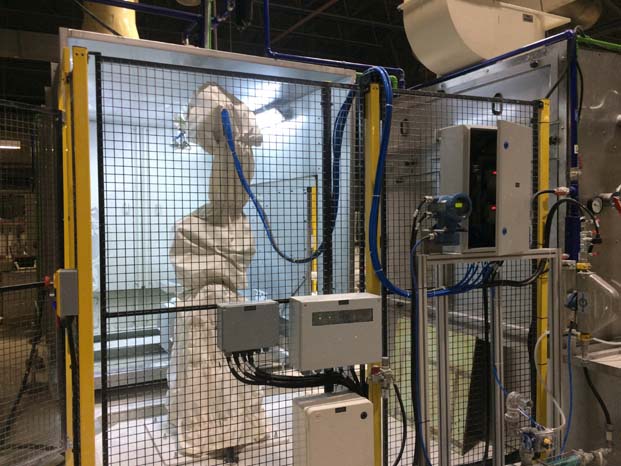
Proje kapsamında geliştirilen sistemde, eş zamanlı çalışan iki robot (6 eksene sahip 165 kg. taşıma kapasitesine sahip taşıma robotu ve 8 eksen ile 8 kg. taşıma kapasitesine sahip olan sır robotu) yer alıyor. Bunlardan biri sır atılacak parçaları taşırken, diğeri sır atışını gerçekleştiriyor. Otomatikleştirilen hat akışı, karışık gelen ürünlerin sırlama işlemini problemsiz bir şekilde yapıyor. Robot ile sırlama, insan gücünden tasarruf sağladığı gibi parça başına tüketilen sır miktarını da düşürüyor. Sır atış programlarının doğru stratejiler ile yazılması ve akış kontrollü pompanın gereğinden yüksek debilerde çalışmasının önlenmesini sağlayan bu sistem, sır tüketimini düşürmeyi mümkün hale getiriyor. Gerekli olmayan yerlerde yüksek debi ile atış yapma zorunluluğu da ortadan kalkıyor. Robot ile sırlama uygulaması sayesinde sır atışının paslanmaz çelik kabin içinde yapılması ortamdaki kimyasalların operatörler tarafından teneffüs edilmesinin de önüne geçiyor.
“Sanal programlarla yeni parça programlama işlemi oldukça kısaltıldı”
Akışkan kontrolünün yeni bir deneyim olduğu projede, PLC içine yazılan özel bloklar ile debi ve kütle ölçümü yapan özel bir sensörden veri alınarak akış miktarını sabit tutacak şekilde sır pompası hız kontrolü gerçekleştirildi. Sır atışının gerçekleştiği ortamda çalışabilecek su ve toza dayanıklı özel bir döner tabla tasarlandı ve imal edildi. Ayrıca robot hareket rotalarının robot paneli üzerinden yapılması ve bilgisayara yüklü simülasyon yazılımı yardımıyla sanal robot programlarının oluşturulması sağlandı. Bu sanal programların gerçek robota yüklenmesi sonucunda da yeni parça programlama işlemi oldukça kısaltıldı.
BENZER KONULAR

08.04.2025
Türkiye Hazır Beton Birliği (THBB), ülkemiz ekonomisine önemli katkılar sunan...

07.04.2025
Mimar Filiz Cingi Yurdakul Ankara kentleşme politikalarına dair önemli açıklamalarda...

07.04.2025
İnşaat sektörü, yenilikçi ve çevre dostu malzemelerle her geçen gün...

07.04.2025
Küresel çapta 20 yıldır düzenlenen Saint-Gobain Mimarlık Öğrencileri Yarışması, 2025...
YORUMLAR